Роботизированный комплекс LokomatPro
Цель терапии на системе Lokomat (Локомат) — используя принцип нейропластичности, улучшить повседневную двигательную активность у пациентов с двигательными нарушениями вследствие неврологических заболеваний. Lokomat комбинирует функциональную локомоторную терапию с мотивационным тренингом и объективной оценкой состояния пациента посредством расширенных инструментов обратной связи и виртуальной реальности, что устанавливает новые стандарты в роботизированной реабилитации.
Новый функционал в версии LokomatPro 2021

- Самостоятельное поддержание равновесия является одним из первых этапов ранней реабилитации. Модуль FreeD позволил впервые совместить такие разные компоненты реабилитации как тренировка динамического равновесия, роботизированную ходьбу и систему разгрузки веса.
- LokomatPro, благодаря наличию функции FreeD является единственным роботизированным экзоскелетным устройством в мире, обладающим 4-я степенями свободы движений в каждой ноге: голеностопном, коленном и двух плоскостях тазобедренного сустава.
- Функция Интерактивной аудиальной поддержки. Пациенты учатся ходить под задаваемый инструктором тактовый ритм, что особенно полезно пациентам с нарушением зрения, также музыкальное сопровождение способно сигнализировать пациенту о корректности выполнения движений.
- Новая версия с дополнительной модальностью биологической обратной связи.
В
М
П
Согласно ВМП:
реабилитационный тренинг с включением биологической обратной связи с применением нескольких модальностей.
Уникальность реабилитационного комплекса LokomatPro
- LokomatPro – это полноценный роботизированный комплекс, который моделирует и воспроизводит естественную человеческую походку, что благодаря объективной обратной связи и активному участию пациента приводит к активации сенсо-моторных сетей головного мозга отвечающих за ходьбу.
- Уникальное программное обеспечение с расширенной биологической обратной связью позволяет повысить вовлеченность пациента в терапию, сфокусировать его внимание на тренировке и конкретных задачах, таких как: использование в паретичной ноги, симметричное распределение длины шага правой и левой конечности, увеличение длины шага и др.
- Программное обеспечение адаптировано и для комфортной работы медицинского персонала, так простая и эргономичная настройка существенно экономят время, а активная калибровка обратной связи, позволяет более точно настроить обратную связь.
- Для облегчения рутинного использования оборудования предусмотрена система автоматической генерации отчетов о динамике реабилитационного процесса, а также отчетов о проделанной работе для пациента.
- Уникальной является система динамической разгрузки массы тела. Она воспроизводит естественный паттерн ходьбы с вертикальным перемещением пациента по высоте (т.н. «амортизацией»). Соблюдение физиологичного паттерна опорной нагрузки позволяет тренировать опорную мускулатуру, не прибегая к большим нагрузкам.
- Отличительной особенностью комплекса является система для контролируемого перемещения таза пациента, имитирующая боковые смещения, повороты таза и фазы переноса веса тела пациента с одной ноги на другую для воспроизведения естественной походки. Модуль FreeD обеспечивает несколько уникальных возможностей для тренировки: ротация таза для активизации мышц корпуса; перенос веса тела с одной ноги на другую; отведение\приведение в тазобедренных суставах.
- LokomatPro, благодаря наличию модуля FreeD является единственным роботизированным экзоскелетным устройством в мире, обладающим 4-я степенями свободы движений в каждой ноге: голеностопном, коленном и двух плоскостях тазобедренного сустава.
- Уникальной особенностью данной комплектации является возможность реабилитации детей ростом от 86 см (приблизительно возраст от 4 лет), а также подростков и взрослых ростом до 202 см на одном комплексе.
- Программное обеспечение адаптируется под тренировки детей или подростков благодаря изменению чувствительности систем безопасности и сенсоров управляющих приводами экзоскелета.
- Единственный стационарный роботизированный экзоскелет, технология которого обладает 9 патентами.
- Наиболее изученное роботизированное устройство для тренировки ходьбы: более 400 исследований независимых исследовательских групп доказали безопасное и эффективное использование Lokomat.
Концепция локомоторной терапии
Роботизированный комплекс Lokomat разработан в сотрудничестве с Центром травмы спинного мозга швейцарской клиники Балгрист. Lokomat является роботизированным экзоскелетным комплексом, выполняющим физиологические движения нижних конечностей у пациентов с нарушениями функции ходьбы. В случаях нарушения двигательной функции (вследствие черепно-мозговых травм, травм спинного мозга, нейрологических, мышечных или костных патологий), терапия на Lokomat улучшает мобильность пациентов.

Инновационная терапия на Lokomat доказала эффективность при восстановлении функции ходьбы у пациентов с травмой и патологией нервной системы, обеспечивая восстановление двигательных функций благодаря последним достижениям в нейрореабилитации.
Главные преимущества терапии на LokomatPro
Lokomat обеспечивает физиологический повторяемый паттерн ходьбы, что чрезвычайно важно на ранних этапах реабилитации. Lokomat позволяет осуществлять высокоинтенсивную терапию, ведущую к быстрому процессу реабилитации.
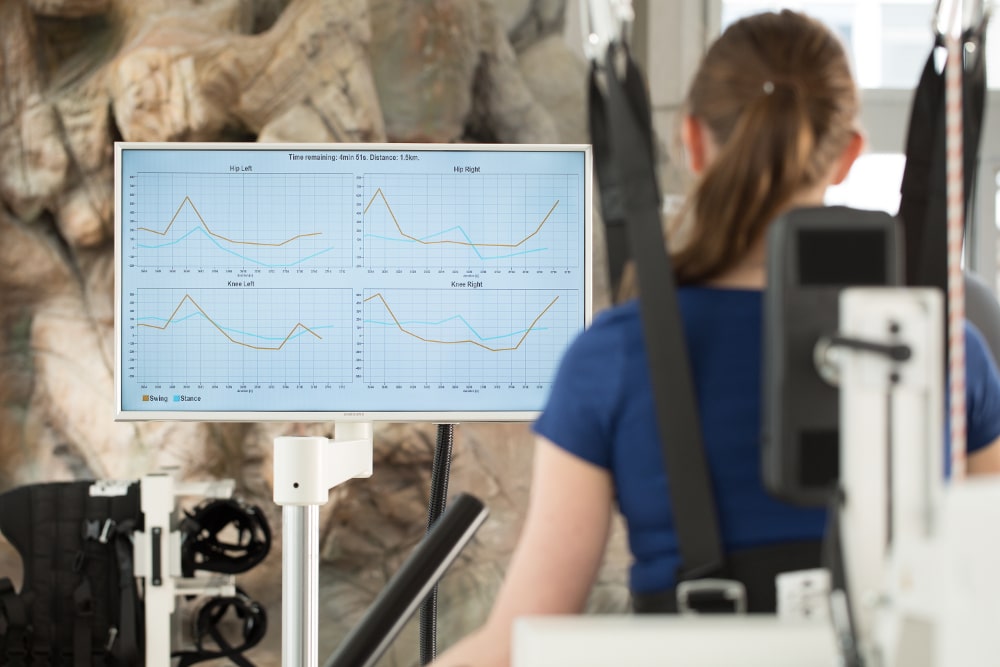


Расширенные инструменты обратной связи Lokomat, отображающие активность ходьбы в режиме реального времени, обеспечивают комплексную точную биологическую обратную связь, и высокий уровень мотивации пациента. Во время тренировки ходьбы на беговой дорожке, происходит естественная стимуляция рецепторов опорных зон стопы, приводящая к обратной афферентации и активации областей коры головного мозга отвечающих за локомоцию, что позволяет заново формировать навыки моторной активности.
Интенсивная функциональная двигательная терапия
Пациенты, находящиеся в инвалидном кресле, могут быть без особого труда переведены в вертикальное положение и закреплены с помощью специальных фиксаторов в Lokomat.



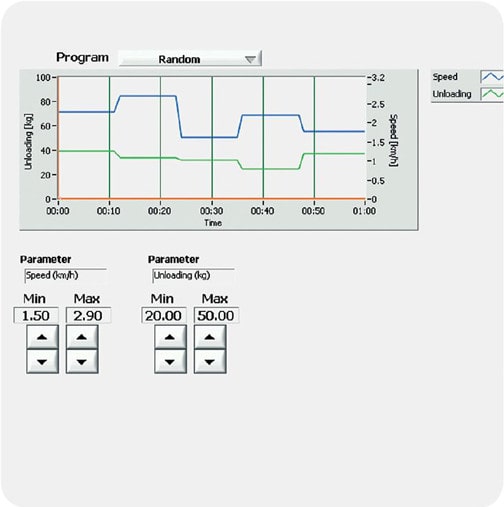
Управляемые компьютером роботизированные ортезы Lokomat точно синхронизированы со скоростью беговой дорожки (диапазон от 1 до 3,2 км/ч). Они задают ногам пациента траекторию движения близкую к физиологическому паттерну ходьбы. Дружественный компьютерный интерфейс позволяет терапевту без особых усилий управлять Lokomat и регулировать параметры тренировки согласно потребностям каждого пациента.
Новые соревновательные программы увеличивают долгосрочную мотивацию пациента
Игровые программы LokomatPro предлагают захватывающие упражнения, которые повышают мотивацию и активность пациента, обеспечивая элементы соревнования с интуитивно понятной системой оценки. Функциональная расширенная обратная связь мотивирует пациента к улучшению конкретных аспектов ходьбы, таких как подъем стопы, длина и симметрия шага.
Даже пациентам с грубыми двигательными нарушениями, которые все еще нуждаются в максимальной поддержке, полезна опция увеличения кинематической вариабельности, значительно улучшающая процесс обучения ходьбе.



В роботизированные ортезы Lokomat встроены специальные датчики силы, которые измеряют активные движения пациента и в дальнейшем позволяют адаптировать интенсивность механической ассистенции движению для каждой конечности в отдельности. Приспосабливаемая в режиме реального времени интенсивность механической ассистенции движению способствует более активному участию пациента в реабилитации.
Интегрированная система обратной связи мониторирует походку пациента и визуально отображает в реальном времени до 8-ми биомеханических характеристик ходьбы, повышая мотивацию пациента и стимулируя процесс двигательного переобучения.
Точная динамическая поддержка массы тела для оптимизации физиологической тренировки ходьбы
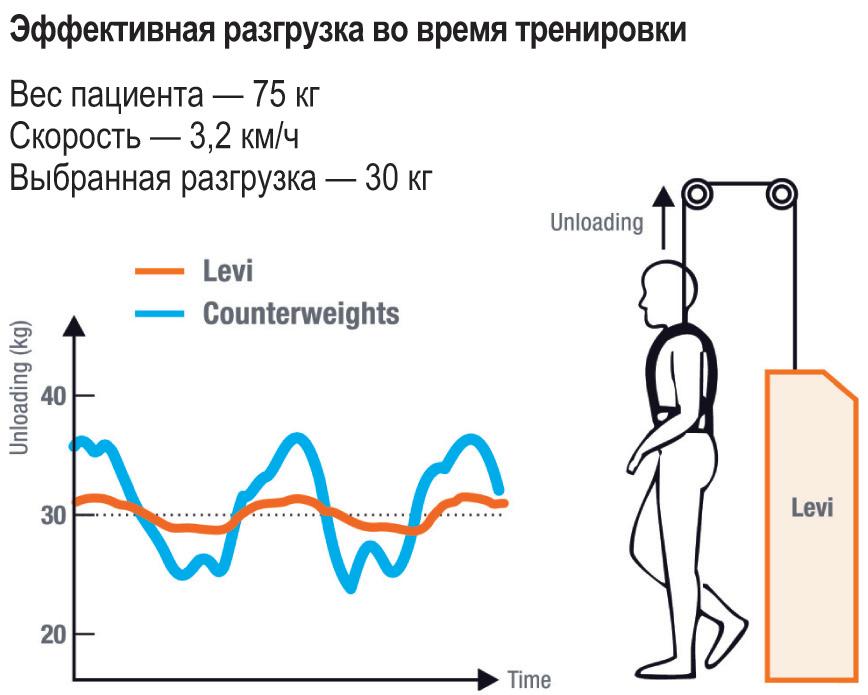
- Усовершенствованная система Levi — система для обеспечения динамической разгрузки веса тела пациента, способствует созданию условий для более физиологической ходьбы и оптимальной сенсорной стимуляции, имитируя вертикальное смещение центра масс во время смены фаз опоры и переноса;
- Система Levi обладает автоматической настройкой, удаленным управлением и хранением данных;
- Автоматизация процесса подъема пациента, разгрузки его массы позволяют оперативно управлять тренировкой;
- Уровень поддержки массы тела может быть точно задан для нужд каждого пациента, гарантируя оптимальные персонифицированные условия тренировки.
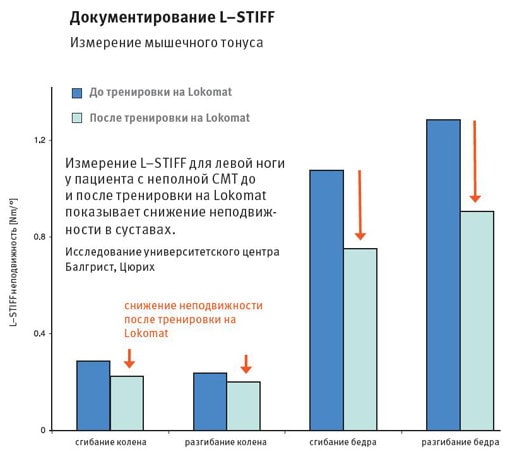
Оценка состояния пациента и документирование прогресса терапии
Инструменты удобной оценки состояния пациента:
- L-WALK: ведет запись данных о походке пациента и хранит эти данные для последующего анализа и документации;
- L-STIFF: измерят спастичность в мышцах сгибателях и разгибателях тазобедренного и коленного суставов пациента в момент осуществления движения нижней конечности по заданной траектории, записывая величину мышечного сопротивления;
- L-FORCE: измеряет изометрическую силу, производимую пациентом;
- L-ROM: Предоставляет точные измерения пассивного объема движений в тазобедренном и коленном суставах пациента без помощи двигателей Lokomat.
Дополнительные экспертные и исследовательские функции:
- Тренировочные программы:
параметры тренировки (например, изменение скорости и разгрузки веса тела) могут быть предварительно запрограммированы;
- Запись:
специальная программа позволяет сохранять широкий спектр данных о тренировке для дальнейшего воспроизведения и анализа.
Снижение физической нагрузки на медицинский персонал
С помощью системы Lokomat, интенсивную двигательную тренировку у тяжелых пациентов в состоянии проводить всего один специалист.
Функция FreeD
Функция свободного перемещения таза (FreeD) — это абсолютно новая и уникальная функция, которая позволяет осуществлять свободные перемещения таза пациента. Она имитирует боковые смещения, повороты таза и фазы переноса веса тела пациента с одной ноги на другую для воспроизведения естественной походки. Модуль обеспечивает несколько уникальных возможностей для тренировки: ротация таза для активизации мышц корпуса, перенос веса тела с одной ноги на другую, отведение\приведение в тазобедренных суставах.
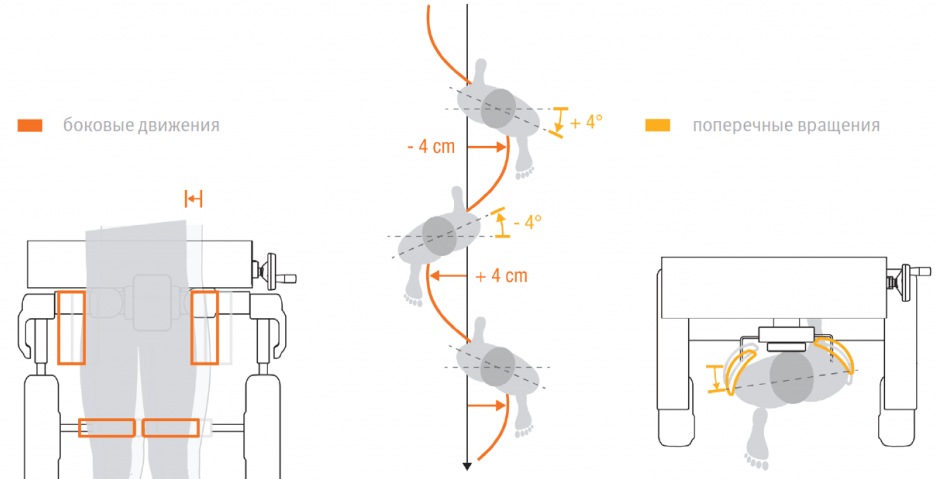
Ключевую роль в биомеханике ходьбы человека играет именно тазобедренный сустав, обладающий наибольшей амплитудой движения, именно поэтому воспроизведение физиологичных движений в нем (не только сгибания\разгибания, но также отведения\приведения) позволяет производить максимально эффективную и приближенную к реальной ходьбе тренировку. Синхронная с ходьбой ротация мышц таза способствует активации мышц корпуса участвующих в нормальной ходьбе. Поддержание равновесия зависит от свободного управления движениями таза, который контролирует расположение центра тяжести и инерционных сил за счет сбалансированных движений вращения грудной клетки и таза. Данные движения являются основой свободной ходьбы.
Самостоятельное поддержание равновесия является одним из первых этапов ранней реабилитации. FreeD позволил впервые совместить такие разные компоненты реабилитации как тренировка динамического равновесия, роботизированную ходьбу и систему разгрузки веса. Благодаря этому стало возможным проводить комплексную тренировку ходьбы и равновесия на одном устройстве с максимальной эффективностью. Латеральные смещения таза позволяют контролировать степень смещения центра тяжести от одной ноги к другой во время ходьбы. Это дает возможность тренировать координацию движений, функцию равновесия и устойчивости.
- Функция FreeD улучшает терапию позволяя выполнять боковые движения и поперечные вращения таза;
- Теперь пациенты могут полностью перенести вес на ногу и тем самым активировать постуральные мышцы и улучшить баланс;
- Свободное отведение и приведение бедра, так же, как и боковое смещение разгрузки веса тела, полностью синхронизированы с движениями таза и ортезов.
Новая функция FreeD повышает эффективность роботизированной терапии, благодаря функции переноса веса тела и активации равновесия посредством боковых и вращательных движений таза.
Наличие данной функции в составе роботизированного комплекса для восстановления ходьбы Lokomat, делает его единственным в мире роботизированным устройством с ортезами (экзоскелетом), обладающим 4-я степенями свободы движений в каждой ноге: голеностопном, коленном и двух плоскостях тазобедренного сустава.