Реабилитационный комплекс Amadeo
Amadeo (Амадео) — это современный роботизированный реабилитационный комплекс, используемый в нейрореабилитации и травматологии.
Преимущества Amadeo
Он показан для пациентов с нарушениями мелкой моторики дистальных отделов верхних конечностей. Данный аппарат является единственным механизированным устройством для восстановления активных движений в пальцах, включая большой, причем позволяет работать одновременно всеми пальцами, последовательно или отдельно каждым пальцем.
В зависимости от возможностей пациента и показаний, возможен как активный, так и пассивный режим работы. Аппарат позволяет производить объективную оценку изометрической силы, объема движений, наличия спазмов, настраивается с учетом индивидуальных особенностей, позволяет оценивать прогресс проводимого лечения.





Вся полученная информация, сохраненная в базе данных, позволяет создать полную документацию, графический анализ, комплексно отражающий лечебный процесс.
Программное обеспечение тренажера Amadeo включает игровые задания, направленные на достижение цели, позволяющие дольше удерживать внимание и повышать мотивацию пациента.
Новый модуль ЭМГ для комплекса Amadeo
Наличие ЭМГ-модуля в роботизированной системе открывает огромные возможности в реабилитации. Поверхностная электромиография (ЭМГ) - это техника неивазивной записи и измерения сигнала для определения электрического потенциала генерируемого клетками мышечной ткани, в моменты их активности (электрической или неврологической).
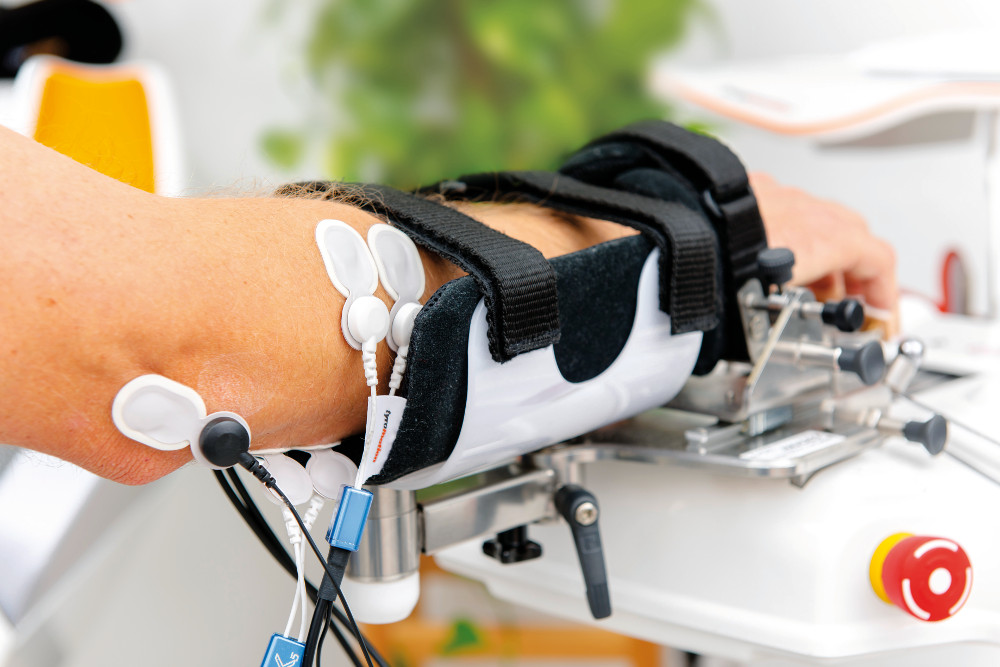
Роботизированная терапия с ЭМГ дает возможность ранней активной реабилитации на этапе между пассивной и активной терапией. Поверхностная электромиография (ЭМГ) может зарегистрировать даже самую малую собственную активность мышц у пациентов с тяжелыми нарушениями, пальцы и кисть которых не функционируют. Помощь роботизированной системы основанная на данных ЭМГ увеличивает собственную активность и мотивацию пациентов, которые не способны осуществлять движения самостоятельно.
Три вида тренировок с контролем ЭМГ
Amadeo предоставляет различные терапевтические модули, такие как Trigger & Go, Trigger & Maintain or Trigger & Coordinate.
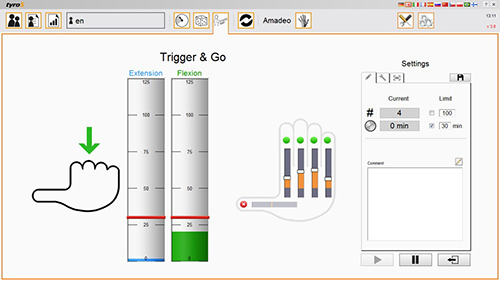
Trigger & Go
Достижение заданного порога ЭМГ является пусковым механизмом для начала движения до конечной заданной позиции.
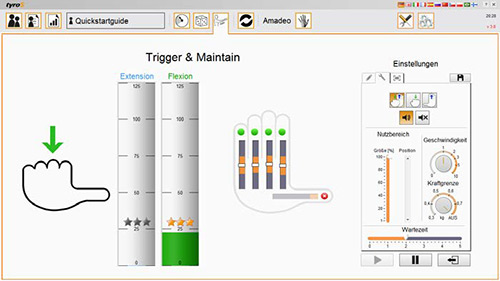
Trigger & Maintain
Постоянный контроль силы давления на уровне выше порогового значения для движения до конечной заданной позиции.

Trigger & Coordinate
Контроль за постоянным преобладанием силы действия агониста над антагонистом, для движения до конечной заданной позиции.
Преимущества использования ЭМГ в роботизированной терапии
- Позволяет рано начинать реабилитацию: особенно у больных с тяжелыми патологиями;
- БОС замкнутого контура: пациент видит какие мышцы активны в данный момент несмотря на то, что нет видимых движений;
- Отображение попыток активности пациента: чем раньше начинается активная реабилитации, тем быстрее происходит восстановление утраченных функций;
- Совершенствование координации мышц антагонистов, которая часто бывает нарушена у пациентов перенесших инсульт.